大家好,我是小月月,今天我们来聊一聊一个基于树莓派CM3模块的双目视觉模块StereoPi。
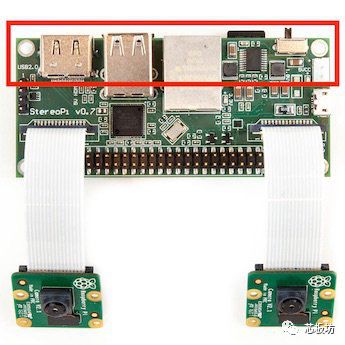
它有一个特制的底板,能接入两个树莓派CSI摄像头模块,并通过驱动接口同步捕获图像。
支持的摄像头包括树莓派摄像头1代(OV5647)、树莓派摄像头2代(sony imx 219)
因为一般的树莓派3B和B+只引出了一个CSI接口,为了实现这个双目摄像头功能,StereoPi需要使用树莓派CM1、CM3或CM3+模块作为核心板。
为了更好的性能,推荐使用4核的CM3B或CM3B+。
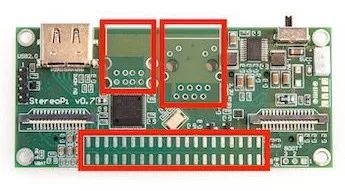
底板引出了必要的接口,总体规格上就是个不带WIFI树莓派。 当然,CSI接口有两个,这点是重点。 板子尺寸是90X40毫米,厚度23毫米。
另外也可以定制15mm的缩减版,去掉GPIO PIN接口、网口和USB接口可以大幅度缩减厚度。
单个树莓派CSI摄像头是4:3画面的,SrereoPi通过内部的驱动接口可以输出8:3的图像。
在这个8:3的图像里,左右摄像头的图像被同步捕获到一个画面里。
举个例子,双目拍照命令如下:
raspistill -3d sbs -w 1280 -h 480 -o 1.jpg
拍得的照片如下:
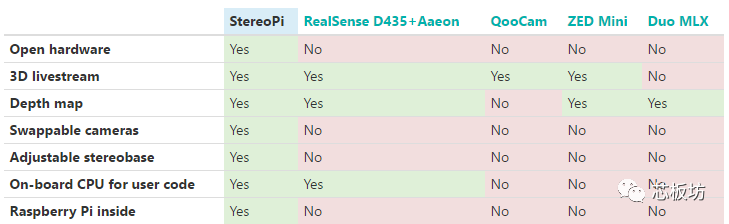
以下是StereoPi与市面上常见的几种双目视觉模块的对比,功能上StereoPi甚至超过了英特尔的RealSense实景相机。
现在自动驾驶汽车和无人机很流行,有了StereoPi,你也能做出酷炫的双目测距。
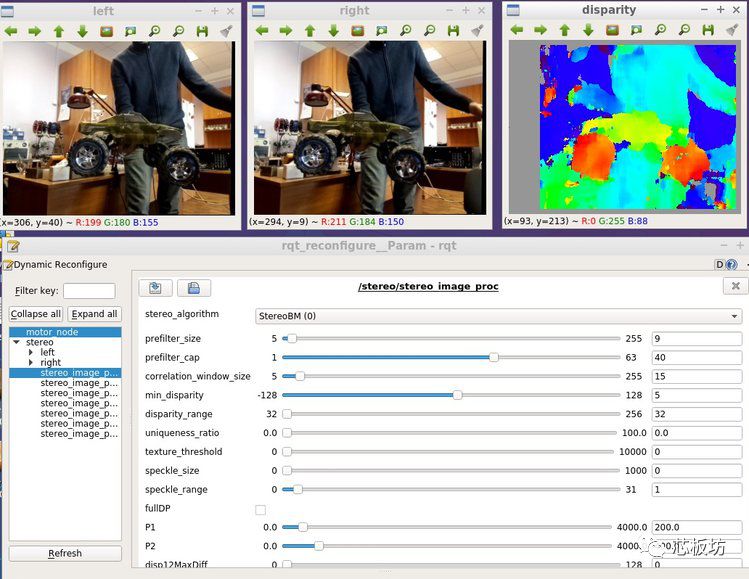
StereoPi支持OpenCV,经过简单的相机畸变校准以后,StereoPi就可以准确构建双目立体视觉测量图。
下面是一个StereoPi通过OpenCV做双目视觉测距的例子。
下面是ROS系统通过双目立体视觉建立3D景深的例子。 现在你可以用SereoPi和SLAM激光扫描仪在ROS系统里共同构建3D虚拟地图了。
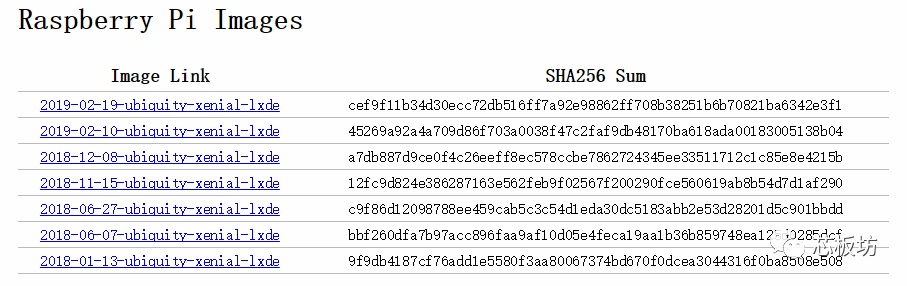
3D地图构建部分的程序不需要你自己来写,全部包含在ROS系统里。 得益于树莓派优秀的软件生态系统,树莓派ROS系统的镜像更新非常快。
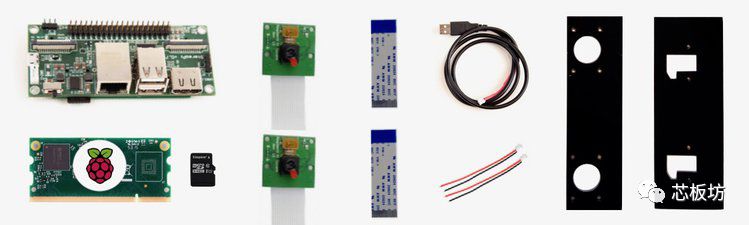
下图是完整的StereoPi Starter Kit的硬件
基于树莓派CM3模块的双目视觉模块StereoPi,支持ROS机器人软件系统
2025年04月05日 芯板坊




2.本站所有资源文章出自互联网收集整理,本站不参与制作,如果侵犯了您的合法权益,请联系本站我们会及时删除。
3.本站发布资源来源于互联网,可能存在水印或者引流等信息,请用户擦亮眼睛自行鉴别,做一个有主见和判断力的用户。
4.本站资源仅供研究、学习交流之用,若使用商业用途,请购买正版授权,否则产生的一切后果将由下载用户自行承担。
5.联系方式(#替换成@):pm#vimge.com