pxfplus是基于嵌入式linux的移动平台控制器,处理器为四核A53,64bit,1.2Ghz。可支持多旋翼、固定翼(VOTL)、无人车、无人船等平台的全自主控制。
pxfplus具有“All In One”的传感器组件: 三轴陀螺仪 、 三轴加速度计 、 三轴电子罗盘 、 气压计 、 空速计 ,
集成GPS (RTK可选),板载RGB LED可显示系统状态,板载433Mhz数字链路满足基本通信需求。
pxfplus预留了丰富的接口:
串口终端、i2c、sbus/ppm输入、16通道pwm输出、adc、USB、TV-OUT等,系统电源模块支持5-30v输入,并可提供电流、电压监测功能。
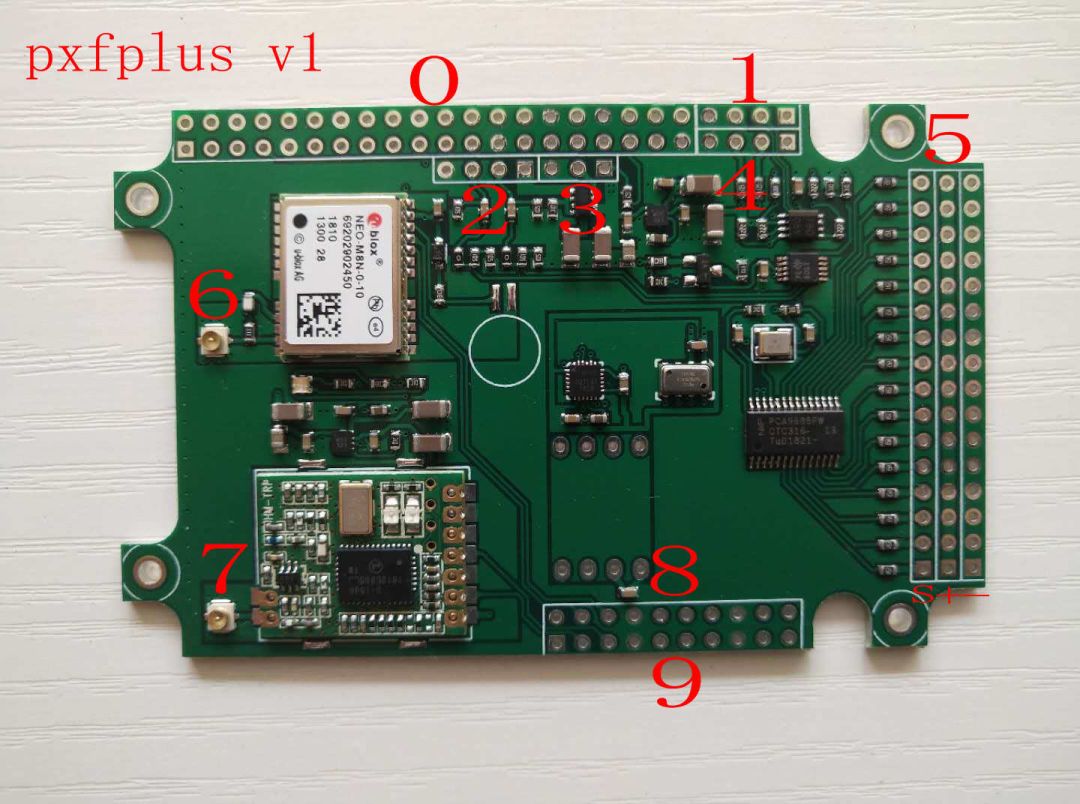
图1-1

图1-2
**
**
** / ** ** 接口说明 ** ** / **
-
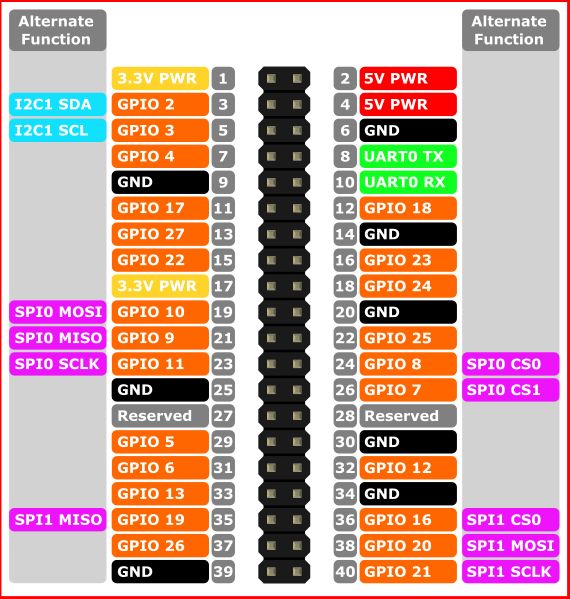
0:兼容树莓派3B引脚,从左到右依次是2*20 pin,见附录
-
1:i2c引脚,从左到右依次是GND、SDA、SCL、+5v;
-
2:系统电源引脚,从左到右依次是GND、CURR、VOLT、+5v,其中CURR是电流检测引脚,VOLT是电压检测引脚;
-
3:sbus/ppm信号输入引脚,从左到右依次是GND、+5v、S;
-
4:串口终端,从左到右依次是GND、RX、TX、+5v;
-
5:16通道pwm输出,从左到右依次是pwm信号、+5v、-,从下到上依次是pwm通道1-16,注意伺服通道+5v内部连接,但不给系统供电,系统会采集伺服电压,-和系统GND相连接;
-
6:GPS天线端子;
-
7:433MHz电台天线端子;
-
8:系统接线,从左到右依次是:+5v、RX2、TX2、GND,此串口连接GPS;+5v、USB_DM4、USB_DP4、GND,USB接口,无连接,用户可连接USB设备;GND、+5v、ADC_IN3;
-
9、系统接线,从左到右依次是+5v、RX1、TX1、GND,此串口连接433MHz电台;+5v、USB_DM3、USB_DP3、GND,USB接口,无连接,用户可连接USB设备;GND、+5v、TV_ADC;
外设说明:
Pxfplus系统包含主控、电源模块、433电台、433天线、GPS天线等组件,如图所示:
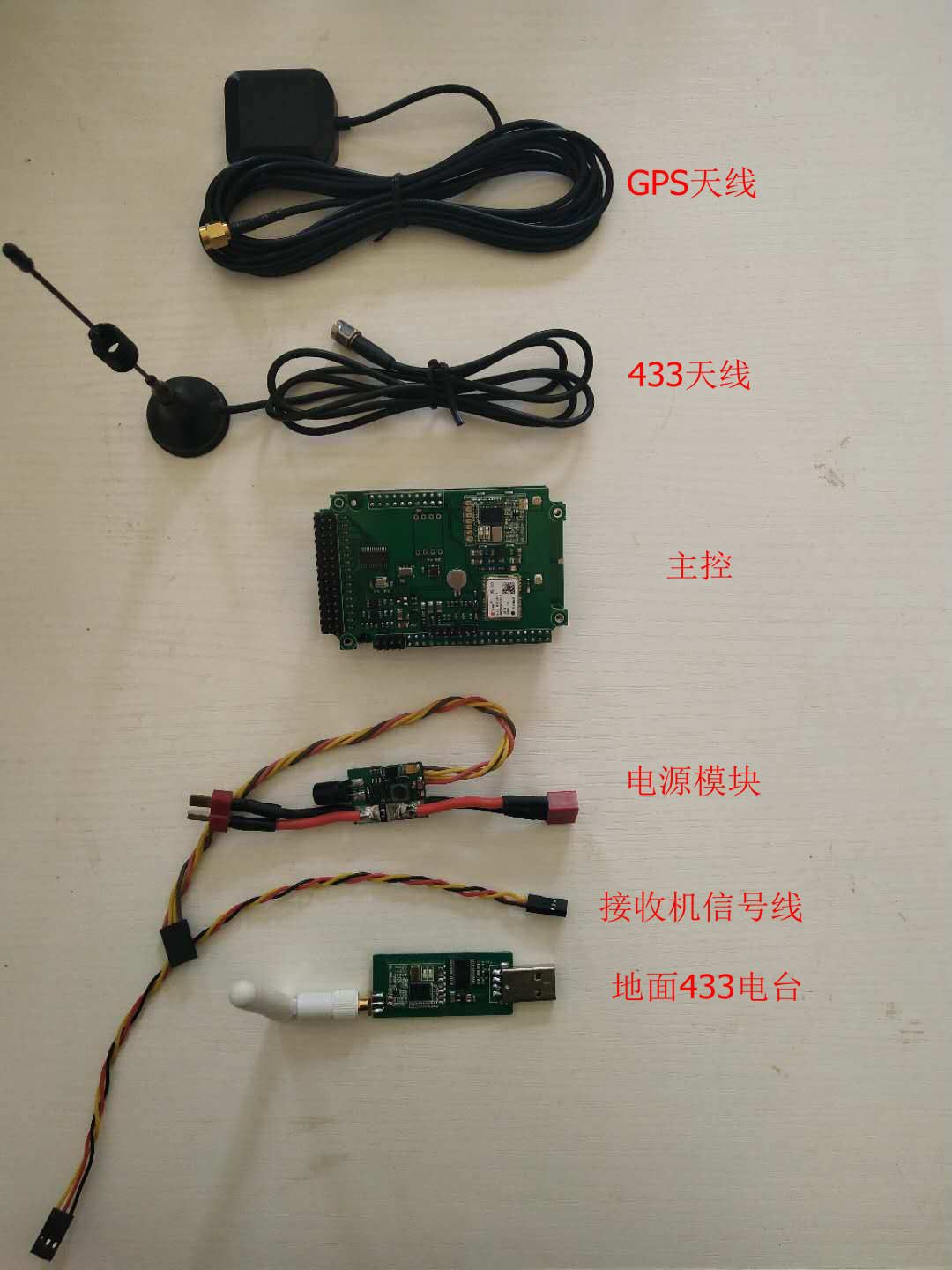
图2-1
安装说明:

图3-1
1、飞控平台应该安装减震,气压计表面应该用透气海绵覆盖;
2、将两个天线分别插入天线座,GPS是有源天线,433天线是螺旋天线,天线应安放稳妥;
3、伺服信号线顺序如图1,电机顺序如图2-1,1、2号电机逆时针旋转,3、4电机顺时针旋转;
4、电源模块输出四根线依次:红色+5v,白色CURR,白色VOLT,黑色GND,和主控对应,不能反插,会烧坏主控;
运行说明:
1、系统上电后自动运行飞控程序,默认为四轴固件;
2、使用串口模块,配合SecureCRT可以登录系统,初始用户为pi,密码respberry;
3、登录系统后用户可以手动选择其他固件;
校准说明:
1、使用MP地面站连接飞控,需要安装电台串口驱动,波特率为115200;
2、接收机支持PPM、SBus接收机,主控会给接收机供电;
3、其他校准可参考APM;
操作说明
1、校准完成后,可以通过遥控器或者地面站解锁,解锁后电机默认低速旋转;
2、解锁方式参考APM;
附录:
1、安装树莓派系统镜像
a)推荐使用emlid系统镜像,已经打好实时补丁;
b)准备一台linux系统主机(开发板),要带usb接口,虚拟机识别不了USB驱动;
c)未完。。。
2、地面站任务规划
a)请参考APM;
3、接口说明
a)树莓派2*20pin引脚图,和底板对应
b) 底板其他接口
☟
** 你可能还想看 **